产品说明
小体积高精度光纤组合航系统QX-IG-S60采用光纤陀螺仪、小直径石英挠性加速度计、高精度IF转换电路和基于DSP/FPGA的数据采集和信号处理电路,可同时测量载体三个方向的加速度和角速度信息;同时内置高性能卫星接收机(支持双天线)、计算机板卡、里程计采集板卡;内置高性能减振器,可在高动态、复杂环境下获取连续、可靠、高精度位置和姿态信息。
配合牵星科技自主研制的QXNAV-IE2.0后处理软件,广泛适用于测绘与地理信息系统、自动驾驶与高精度定位、无人系统、交通运输与智能交通、国防与安全、科研与开发。
产品特性
1)小型化高精度,产品尺寸小100x100x98mm,重量1.4kg,陀螺精度(100s平滑)0.02°/h
2)支持牵星科技自主研制的QXNA-IE 2.0后处理软件,支持GNSS、INS、轮速计等多源融合,综合性能优于Novatel-IE
3)产品采用一体设计,内减振器设计方案,IMU与卫导解算模块组成整机,系统集成度高,使用便捷,抗振动能力强
4)支持扰动基座实现快速对准,惯性/卫星/轮速/车速/视觉组合导航
5)支持自组网、编队组合定位、相对定位,千寻RTK与动动差分
产品指标
大项 | 小项 | 单位 | QX-IG-S60 |
陀螺指标 | 量程 | °/s | ±500 |
零偏稳定性 (10s平滑 0σ室温) | °/h | 0.06 |
零偏稳定性 (100s平滑 1σ室温) | °/h | 0.02 |
零偏重复性 | °/h | 0.02 |
随机游走 | °/√h | 0.003 |
标度因数非线性 | ppm | ≤10 |
标度因数重复性 | ppm | ≤20 |
带宽 | Hz | ≥200 |
加计指标 | 量程 | g | ±40 |
零偏稳定性(100s平滑 1σ室温) | μg | ≤20 |
零偏重复性 | μg | ≤20 |
标度因数非线性 | ppm | ≤20 |
标度因数重复性 | ppm | ≤15 |
带宽 | Hz | ≥800 |
组合导航 | 信号跟踪 | BDS | B1/B2/B3 |
GPS | L1/L2 |
GLONASS | E1/E5 |
Galileo | G1/G2 |
单点定位精度(RMS) | 平面 | m | ≤2 |
高程 | m | ≤3 |
DGPS定位精度(RMS)
差分全球定位系统 | 平面 | m | ≤0.5 |
高程 | m | ≤1.0 |
RTK定位精度(RMS)
实时动态载波相位差分 | 平面 | cm | ≤1.0cm+1ppm |
高程 | cm | 1.5cm+1ppm |
姿态精度(RMS) | ° | ≤0.005 |
航向角精度(RMS) | ° | ≤0.1 |
升沉精度(RMS) | cm | 5cm或5%量程 |
轮速组合 (RMS) | %D | ≤0.1 |
测速精度(RMS) | m/s | ≤0.01 |
PPS 授时精度(RMS) | ns | ≤20 |
数据更新率 | Hz | 200(可定制) |
数据后处理(PPK) | 定位精度 (GNSS失锁) | 60s | cm | ≤10 |
180s | cm | ≤25 |
姿态精度(RMS) | ° | ≤0.003 |
航向(RMS) | ° | ≤0.03 |
测速精度(RMS) | m/s | ≤0.01 |
升沉精度(RMS) | cm | 2cm或2%量程 |
纯惯性 | 自寻北精度(RMS) | ° | ≤0.15 |
自寻北时间 | s | ≤5min |
姿态精度(RMS) | ° | ≤0.003 |
航向保持精度(RMS) | °/h | ≤0.05 |
定位精度(RMS) | 60s | m | ≤0.5 |
180s | m | ≤5 |
300s | m | ≤20 |
导航精度(RMS) |
| km/h | ≤2.8 |
基础信息 | 数据存储 | Gb | 16 |
工作电压 | V | DC12V(9~36V) |
尺寸 | mm | 100×100×98 |
功耗 | w | ≤12 |
重量(不含线缆) | kg | ≤1.4 |
工作温度 | ℃ | -40~65 |
冷启动时间 | s | ≤30 |
防护等级 | IP65 |
接口 | 接口:PPS输出(3.3v,10mA)、外部事件触发、CAN2.0、RS232、RS422、网口(RJ45) |
★ 牵星QXNAV-IE2.0后处理软件
QXNAV-IE数据后处理软件是湖南牵星科技有限公司自主知识产权的实时定位及后处理软件,包括RTK、PPK,基于载波相位的INS/GNSS松耦合、紧耦合,后处理平滑等。QXNAV-IE数据后处理软件在国内高精度地图、公路/铁路测量测绘、自动驾驶评测等领域有着广泛的应用,累计测试5年时间,累计里程达数百万公里,场景涵盖城市高楼宇、高架桥、林荫路、隧道、快速路等。
主要特点
Ø 支持单北斗;
Ø 支持RTK、PPK、PPP;
Ø 支持GNSS、INS、轮速计等多源融合;
Ø 支持ZUPT、NHC;
Ø 多平台:linux和windows;
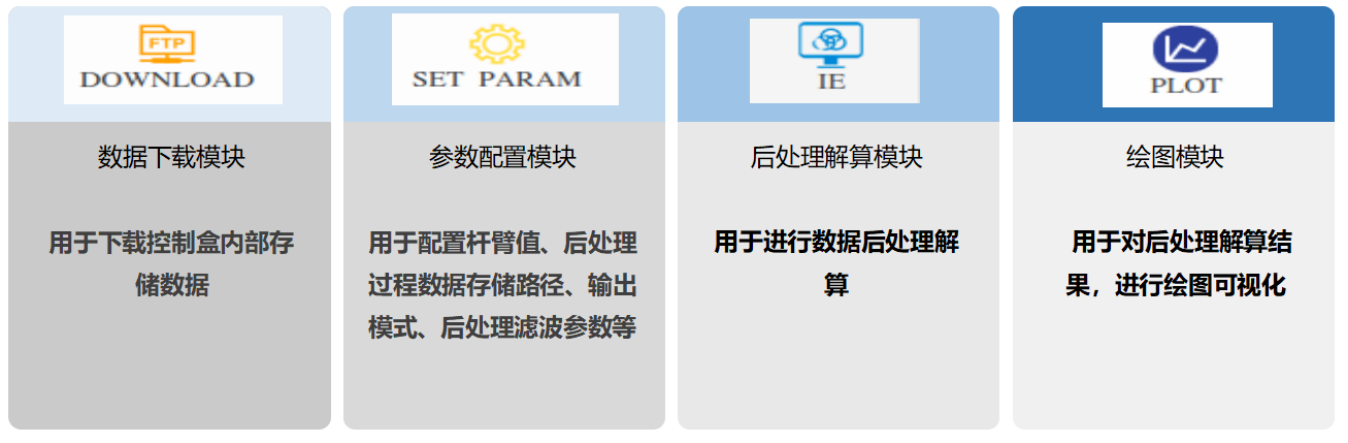
主要功能
QXNAV-IE按功能划分为四个模块:数据下载、参数配置、后处理解算、轨迹绘图。
软件优势
QXNAV-IE支持BDS、GPS、GLONASS、Galileo、QZSS、SBAS 全系统全频点GNSS数据处理,也可支持单北斗模式的数据处理。相比国外的Novatel-IE数据后处理软件,具有以下优势:
(1) 增加了BD3卫星应用,提高了城市遮挡环境的数据精度;
(2) 采用模糊自适应滤波技术,数据处理的精度、环境适应能力及稳定性高;
(3) 停车数据稳定,不发生漂移;
(4) 可支持单北斗模式;
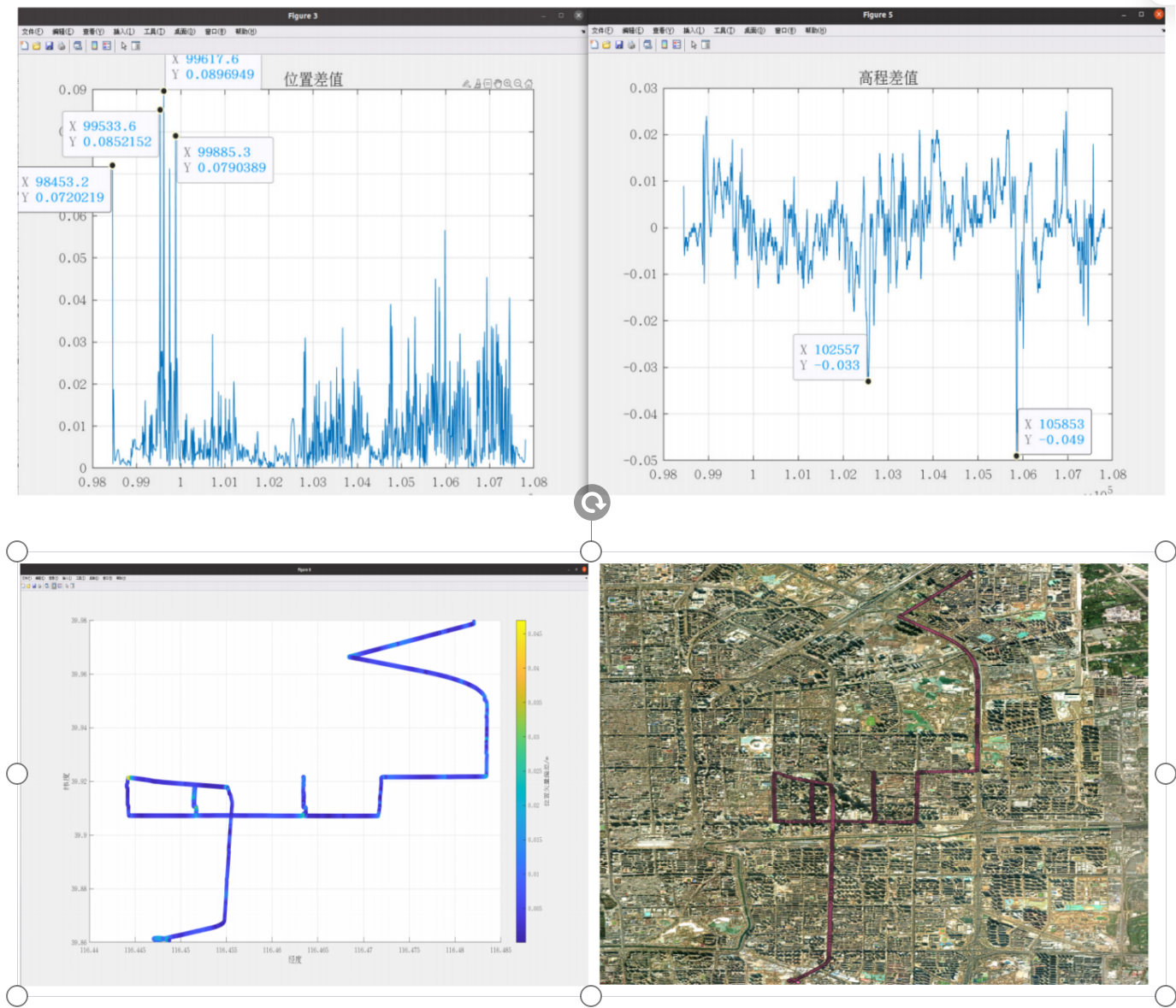
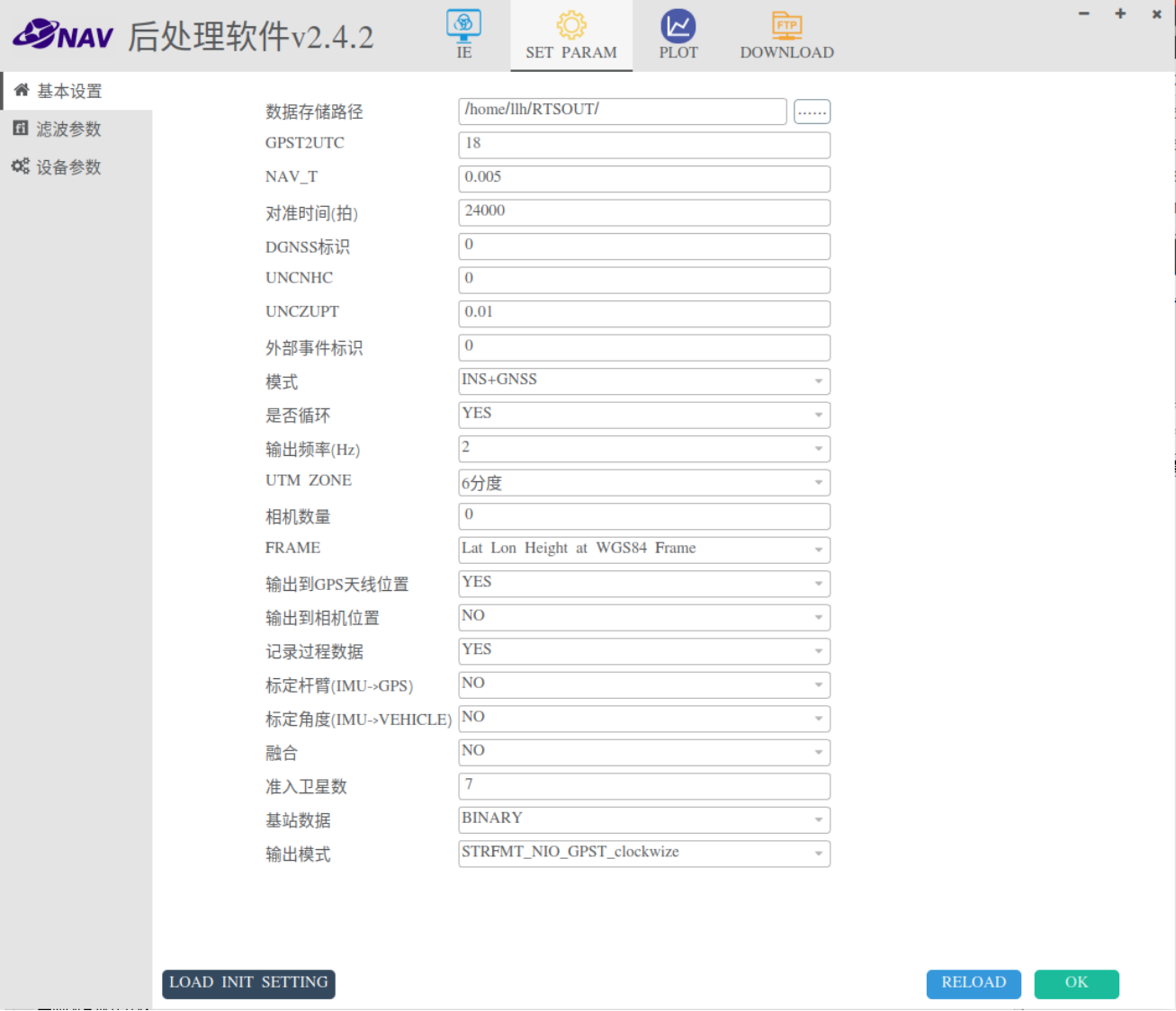
操作界面
后处理结果展示