产品特点
Ø 尺寸106×89×73mm,重量750g;
Ø 支持实时组合导航和后处理,后处理精度提升数倍,包括实时差分动态定位(RTK)、动态后处理定位(PPK)、 INS/GNSS/轮速计松耦合、紧耦合组合导航,支持ZUPT、NHC技术;
Ø 系统可支持16G数据存储空间,可满足外业连续12小时的数据采集及存储;
Ø 采用时钟硬同步方案,具有1路事件标记输入输出功能,1路PPS输出;
Ø 后处理支持自架基站,同时兼容千寻、六分科技等网络差分,不受基线限制,采集方便、作业效率高。
QX-F40D是一款基于光纤陀螺和高精度MEMS加速度计的一体化组合导航系统,内部集成低性能惯组、卫星板卡、磁传感器、气压传感器、组合导航板。后处理支持自架基站,同时兼容主流差分服务商的差分数据格式,不受基线限制,采集方便、作业效率高。
主要功能
QX-F40D组合导航系统主要功能如下表所示:
编号 | 项目 | 详细状态 |
1 | GNSS RTK定位功能 | 可接收外部差分信息等数据,实现卫星板卡RTK厘米级定位功能 |
2 | 纯惯性导航功能 | 可连续计算位置、速度、姿态、航向等信息 |
3 | 惯性/卫星组合 导航功能 | 利用RTK信息和惯导融合,输出融合后的位置、速度和姿态信息,并校准惯性器件误差 |
4 | 惯性/里程计 组合导航功能 | 利用里程计测速信息和惯导融合,输出融合后的位置、速度和姿态信息,并校准惯性器件误差 |
5 | 开机和过程自检功能 | 上电后及工作过程中,实时检测产品内部传感器、电路、软件等工作情况,并及时上报错误信息 |
6 | IMU状态实时显示功能 | 通过状态字等实时显示IMU工作状态 |
7 | 设备参数配置功能 | 可通过网口修改配置文件对各项参数进行配置 |
8 | 软件升级功能 | 可通过网口完成设备软件升级 |
9 | 原始数据存储功能 | 可实时存储IMU、GPS和RTCM原始数据 |
10 | Enent Mark功能 | 具有1路外部事件(如相机)输入接口、可准确记录Event时间 |
产品特性
☆ 多源融合抗干扰紧耦合技术
☆ 具备快速自对准功能
☆ 实时输出10、20、100、200Hz,可配置数据更新率
☆ 可外接轮速传感器,车载环境下惯性/里程计多种误差自动标定
☆ 产品上电自检
☆ IP65 级别防水防尘
☆ 可以选配磁力计、气压计
产品性能指标
QX-F40D组合导航系统 |
内容 | 单位 | 指标 |
陀螺指标 | 量程 | °/s | ±500 |
零偏稳定性 (10s平滑 1σ室温) | °/h | ≤0.12 |
零偏稳定性 (100s平滑 1σ室温) | °/h | ≤0.04 |
零偏重复性 | °/h | ≤0.12 |
随机游走 | °/√h | ≤0.01 |
标度因数非线性 | ppm | ≤50 |
标度因数重复性 | ppm | ≤100 |
带宽 | Hz | ≥200 |
加计指标 | 量程 | g | ±30 |
零偏稳定性(10s平滑 1σ室温) | μg | ≤50 |
零偏重复性 | μg | ≤50 |
标度因数非线性 | ppm | ≤500 |
标度因数重复性 | ppm | ≤500 |
带宽 | Hz | ≥200 |
组合导航 | 信号跟踪 | BDS | B1/B2/B3 |
GPS | L1/L2 |
GLONASS | E1/E5 |
Galileo | G1/G2 |
单点定位精度(RMS) | 平面 | m | ≤1.5 |
高程 | m | ≤2.5 |
DGPS定位精度(RMS) | 平面 | m | ≤0.4 |
高程 | m | ≤0.8 |
RTK定位精度(RMS) | 平面 | cm | 1cm+1ppm |
高程 | cm | 1.5cm+1ppm |
姿态精度(RMS) | ° | ≤0.01 |
航向角精度(RMS,2m基线) | ° | ≤0.1 |
升沉精度(RMS) | cm | 5 cm或5%量程 |
轮速组合 (RMS) | %D | ≤0.1 |
测速精度(RMS) | m/s | ≤0.02 |
PPS 授时精度(RMS) | ns | ≤20 |
数据更新率 | Hz | 200(可定制) |
数据后处理 | 定位精度 (GNSS失锁) | 60s | cm | ≤20 |
180s | cm | ≤50 |
姿态精度(RMS) | ° | ≤0.007 |
航向(RMS) | ° | ≤0.06 |
测速精度(RMS) | m/s | ≤0.02 |
纯惯性 | 自寻北精度(RMS) | ° | ≤0.3 |
自寻北时间 | s | ≤5min |
姿态精度(RMS) | ° | ≤0.01 |
航向保持精度(RMS) | °/h | ≤0.2 |
定位精度(RMS) | 60s | m | ≤5 |
180s | m | ≤20 |
300s | m | ≤100 |
导航精度(RMS) | km/h | ≤6 |
基础信息 | 数据存储 | Gb | 16 |
工作电压 | V | DC12V(9~36V) |
尺寸 | mm | 106×89×73 |
功耗 | w | ≤10 |
重量(不含线缆) | kg | ≤0.75 |
工作温度 | ℃ | -40~65 |
冷启动时间 | s | ≤30 |
防护等级 | IP65 |
接口:PPS输出(3.3v,20mA)、外部事件触发、CAN2.0、RS232、RS422、网口(RJ45) |
★ 牵星QXNAV-IE2.0后处理软件
QXNAV-IE数据后处理软件是湖南牵星科技有限公司自主知识产权的实时定位及后处理软件,包括RTK、PPK,基于载波相位的INS/GNSS松耦合、紧耦合,后处理平滑等。QXNAV-IE数据后处理软件在国内高精度地图、公路/铁路测量测绘、自动驾驶评测等领域有着广泛的应用,累计测试5年时间,累计里程达数百万公里,场景涵盖城市高楼宇、高架桥、林荫路、隧道、快速路等。
主要特点
Ø 支持单北斗;
Ø 支持RTK、PPK、PPP;
Ø 支持GNSS、INS、轮速计等多源融合;
Ø 支持ZUPT、NHC;
Ø 多平台:linux和windows;
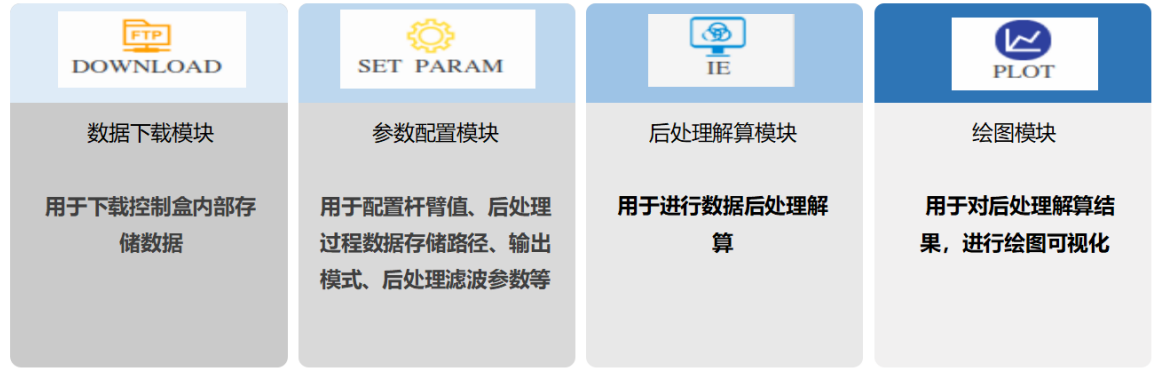
主要功能
QXNAV-IE按功能划分为四个模块:数据下载、参数配置、后处理解算、轨迹绘图。
软件优势
QXNAV-IE支持BDS、GPS、GLONASS、Galileo、QZSS、SBAS 全系统全频点GNSS数据处理,也可支持单北斗模式的数据处理。相比国外的Novatel-IE数据后处理软件,具有以下优势:
(1) 增加了BD3卫星应用,提高了城市遮挡环境的数据精度;
(2) 采用模糊自适应滤波技术,数据处理的精度、环境适应能力及稳定性高;
(3) 停车数据稳定,不发生漂移;
(4) 可支持单北斗模式;
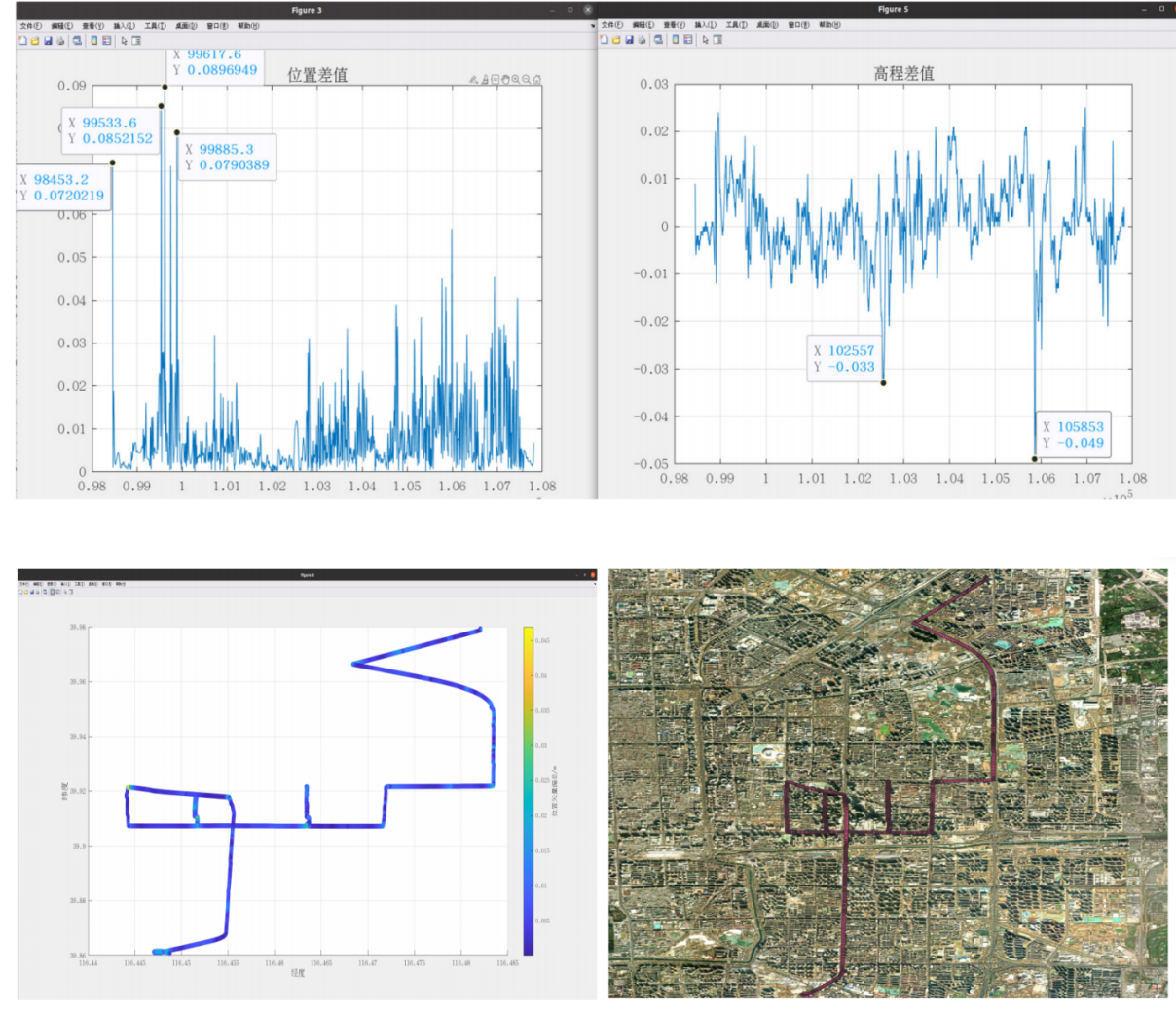
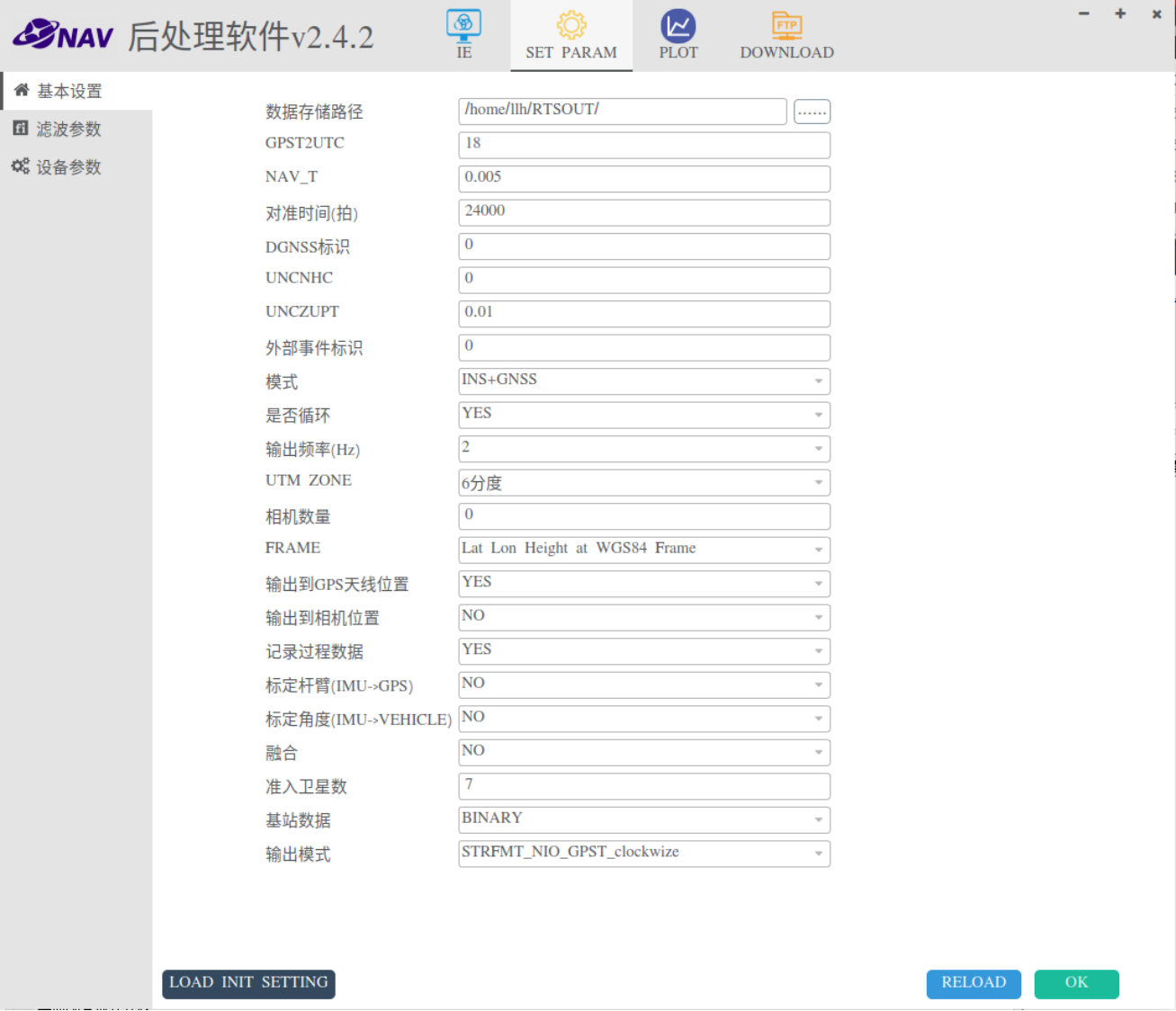
操作界面
后处理结果展示