产品简介
QX-F90J 高精度组合导航系统包含高精度组合导航主机、抗干扰卫星接收天线、导航软件等。主机内部采用全国产化高精度光纤陀螺仪、石英挠性加速度计、高精度 IF转换电路与基于 ARM 的数据采集及信号处理电路,集成军码高精度北斗三号定位板卡、计算板卡、里程计采集模块,可同时测量载体三个方向的加速度和角速度信息。
· 采用高性能光纤陀螺,卫星失锁后位置推算精度高;
· 支持扰动基座实现快速对准,惯性 / 卫星 / 轮速 / 车速组合导航;
· 支持自组网、编队组合定位、相对定位等定位技术;
· 支持实时组合导航和后处理,包括实时差分动态定位(RTK)、INS/GNSS/ 轮速计组合导航,支持 ZUPT、NHC 技术;
· 采用时钟硬同步方案,1 路驱动后 PPS 输出;
· 抗干扰天线具备北斗 B3 频点抗干扰能力,可有效抑制宽带、窄带、多音、单音、扫频、脉冲等典型样式干扰及上述样式组合干扰的能力,具备抗 10w 功率烧毁功能;具备 RNSS 抗压制式干扰能力;具备抗欺骗干扰能力。
· 军码高精度北斗三号定位板卡选用兼容 BAA002 密码模块,北斗三号通用型授权芯片,使用 2000 中国大地坐标系(CGCS2000 坐标系),1985 国家高程基准。
产品参数
项目 | 单位 | 数据 |
陀螺 | 量程 | ° /s | ±400 |
零偏稳定性 (100s 平滑 1σ 室温) | ° /h | ≤ 0.006 |
零偏重复性 | ° /h | ≤ 0.006 |
随机游走 | ° / √ h | ≤ 0.0006 |
标度因数非线性 | ppm | ≤ 10 |
标度因数重复性 | ppm | ≤ 10 |
带宽 | Hz | ≥ 200 |
加表 | 量程 | g | ±10(可定制) |
零偏稳定性(10s 平滑 1σ 室温) | μg | ≤ 10 |
零偏重复性 | μg | ≤ 10 |
随机游走 | μg/ √ Hz | ≤ 0.1 |
标度因数非线性 | ppm | ≤ 10 |
标度因数重复性 | ppm | ≤ 10 |
带宽 | Hz | ≥ 200 |
项目 | 单位 | 数据 |
组合导航 | 信号跟踪 | BDS | B1/B2/B3 |
GPS | L1/L2 |
GLONASS | E1/E5 |
Galileo | G1/G2 |
单点定位精度(RMS) | 平面 | m | ≤ 1.5 |
高程 | m | ≤ 2.5 |
DGPS 定位精度(RMS) | 平面 | m | ≤ 0.4 |
高程 | m | ≤ 0.8 |
RTK 定位精度(RMS) | 平面 | cm | 1cm+1ppm |
高程 | cm | 1.5cm+1ppm |
PPP 定位精度(RMS) | 平面 | cm | ≤ 3 |
高程 | cm | ≤ 5 |
姿态精度(RMS) | ° | ≤ 0.005 |
航向角精度(RMS) | ° | ≤ 0.02 |
升沉精度(RMS) | cm | 5 cm 或 5% 量程 |
轮速组合 (RMS) | %D | ≤ 0.04 |
测速精度(RMS) | m/s | ≤ 0.01 |
PPS 授时精度 (RMS) | ns | ≤ 20 |
数据更新率 | Hz | 200( 可定制 ) |
数据后处理 | 定位精度 (GNSS 失锁 ) | 60s | cm | ≤ 4 |
180s | cm | ≤ 10 |
姿态精度(RMS) | ° | ≤ 0.005 |
航向(RMS) | ° | ≤ 0.01 |
测速精度(RMS) | m/s | ≤ 0.01 |
升沉精度(RMS) | cm | 2 cm 或 2% 量程 |
纯惯性 | 自寻北精度(RMS) | ° | ≤ 0.03 |
自寻北时间 | s | ≤ 5min |
姿态精度(RMS) | ° | ≤ 0.005 |
航向保持精度(RMS) | ° /h | ≤ 0.02 |
定位精度(RMS) | 60s | m | ≤ 0.3 |
180s | m | ≤ 2.0 |
300s | m | ≤ 6.8 |
导航精度(RMS) | km/h | ≤ 1.2 |
基础信息 | 数据存储 | Gb | 16 |
工作电压 | V | DC12V(9~36V) |
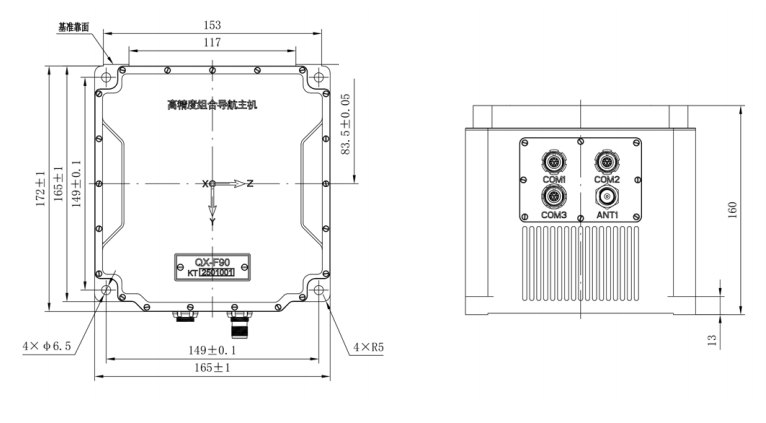
尺寸 | mm | 148×140×149 |
功耗 | w | ≤ 15 |
重量(不含线缆) | kg | ≤ 5.0 |
工作温度 | ℃ | -40~65 |
冷启动时间 | s | ≤ 30 |
防护等级 | — | IP67 |
接口 | PPS 输出 (3.3v,20mA)、外部事件触发、CAN2.0、 RS232、RS422、网口 (RJ45) |
产品外形