产品由 MEMS 惯性测量单元,配合完全自主知识产权的航向姿态和互补滤波 算法,通过测量载体的三轴角速度和三轴线加速度,计算俯仰角、横滚角和相对 航向角信息,可在动态环境下输出稳定、可靠的角速率、加速度、姿态等数据。
应用方向 ·导航 ·控制 ·测量 ·定位定向
参数(典型值) | 单位 | 基本型 |
航向角漂移(初始值 0°, RMS) | ° /h | 20 |
俯仰角精度 / 横滚角精度(RMS) | ° | 静态:0.1 |
° | 动态:0.2 |
陀螺仪 | 测量范围 | ° /s | ±480 |
零偏稳定性(10s 平滑,1σ,室温) | ° /h | 3 |
全温零偏变化(10s 平滑,RMS,变温) | ° /h | 20 |
零偏重复性 | ° /h | 5 |
随机游走 | ° / √ h | 0.15 |
带宽 | Hz | 250 |
标度因数非线性 | ppm | 100 |
标度因数重复性 | ppm | 100 |
交叉耦合 | % | 0.1 |
加速度计 | 测量范围 | g | ±20 |
零偏稳定性(10s 平滑,1σ,室温) | mg | 0.25 |
全温零偏变化(10s 平滑,RMS,变温) | mg | 2 |
零偏重复性 | mg | 0.5 |
带宽 | Hz | 200 |
标度因数重复性 | ppm | 500 |
交叉耦合 | % | 0.1 |
数据更新率 | Hz | 500(可定制) |
电压 | V | 3.3±0.33 |
功耗 | W | ≤ 1.5 |
工作温度 | ℃ | -45~85 |
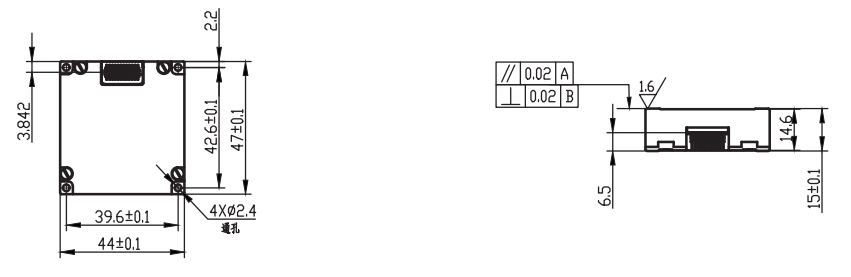
尺寸 | mm | 44*47*15 |
重量 | g | ≤ 50 |
接口 | —— | TTL |
产品外形图