产品由 MEMS 陀螺芯片、MEMS 加速度计芯片、温度传感器、数字信号处理 电路、结构及软件等组成,采用柔性连接技术,内置全温补偿、安装失准角补偿、 非线性补偿等补偿算法 , 在静态、动态以及恶劣条件下也能为用户输出经过误差 补偿后稳定可靠的测量数据,可原位兼容 HG4930 系列产品。
应用方向 ·导航 ·控制 ·测量
参数(典型值) | 单位 | 基本型 | A 型 | B 型 | C 型 | F 型 |
陀 螺 仪 | 测量范围(可定制) | ° /s | ±400 | ±400 | ±400 | ±2000 | ±300 |
零位偏置 | ° /h | 15 | 10 | 3 | 30 | 3 |
零偏不稳定性(@ALLAN 方差) | ° /h | 0.3 | 0.1 | 0.05 | 1 | 0.03 |
零偏稳定性(10s 平滑,1σ, 室温) | ° /h | 3 | 1 | 0.4 | 6 | 0.2 |
零偏重复性 | ° /h | 3 | 1 | 0.3 | 3 | 0.1 |
全温范围内零偏误差 | ° /h | 20 | 10 | 2 | 30 | 1 |
随机游走 | ° / √ h | 0.15 | 0.05 | 0.02 | 0.3 | 0.01 |
零偏加速度敏感度 | ° /h/g | 2 |
分辨率 | ° /s | 0.0005 | 0.0003 | 0.0001 | 0.001 | 0.0001 |
输出噪声(半峰值) | ° /s | 0.3 | 0.25 | 0.15 | 0.45 | 0.15 |
带宽 | Hz | 250 | 150 | 250 | 100 |
标度因数非线性 | ppm | 100 |
标度因数重复性 | ppm | 100 |
交叉耦合 | % | 0.1 |
参数(典型值) | 单位 | I 型 | II 型 | III 型 | IV 型 |
加 速度计 | 测量范围(可定制) | g | ±10 | ±30 | ±50 | ±80 |
零偏不稳定性(@ALLAN 方差) | mg | 0.005 | 0.007 | 0.01 | 0.015 |
零偏稳定性(10s 平滑,1σ, 室温) | mg | 0.05 | 0.2 | 0.5 | 1 |
零偏重复性 | mg | 0.1 | 0.2 | 0.3 | 0.5 |
全温范围内零偏误差 | mg | 1 | 2 | 3 | 5 |
随机游走 | m/s/ √ h | 0.012 | 0.018 | 0.018 | 0.06 |
分辨率 | mg | 0.1 |
带宽 | Hz | 200 |
标度因数重复性 | ppm | 500 |
交叉耦合 | % | 0.1 |
参数(典型值) | 单位 | 基本型 |
其他 | 启动稳定时间 | s | 1 |
数据更新率 | Hz | 600 |
电压 | V | 5±0.5 |
稳态功耗 | W | 2 |
纹波 | mV | 100 |
工作温度 | ℃ | -45~85 |
储存温度 | ℃ | -55~105 |
重量 | g | 120 |
尺寸 | mm | φ64.78*35.6 |
接口 | —— | RS-422 |
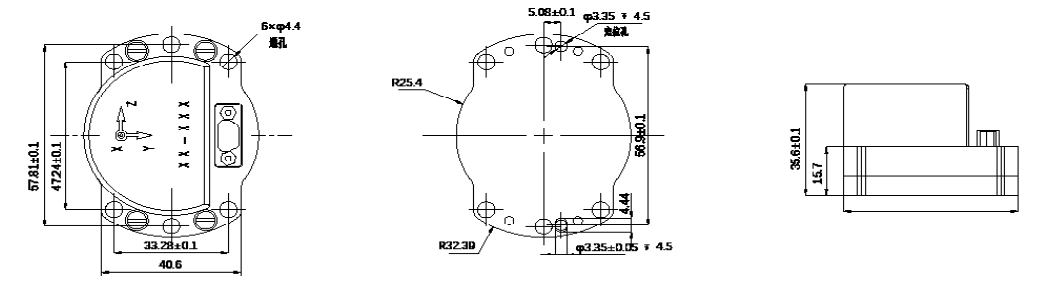
产品外形图